Base class for coordinate system specification, the default coordinate system type is cartesian . More...
Classes | |
| struct | iNew |
Public Member Functions | |
| TypeName ("coordinateSystem") | |
| coordinateSystem () | |
| coordinateSystem (const coordinateRotation &crot) | |
| coordinateSystem (coordinateRotation &&crot) | |
| coordinateSystem (const coordinateSystem &csys) | |
| coordinateSystem (coordinateSystem &&csys) | |
| coordinateSystem (autoPtr< coordinateSystem > &&csys) | |
| coordinateSystem (const word &name, const coordinateSystem &csys) | |
| coordinateSystem (const point &origin, const coordinateRotation &crot) | |
| coordinateSystem (const point &origin, const vector &axis, const vector &dirn) | |
| coordinateSystem (const word &name, const point &origin, const coordinateRotation &crot) | |
| coordinateSystem (const word &name, const point &origin, const vector &axis, const vector &dirn) | |
| coordinateSystem (const word &name, const dictionary &dict) | |
| coordinateSystem (const dictionary &dict) | |
| coordinateSystem (const dictionary &dict, const word &dictName) | |
| virtual autoPtr< coordinateSystem > | clone () const |
| declareRunTimeSelectionTable (autoPtr, coordinateSystem, dictionary,(const dictionary &dict),(dict)) | |
| declareRunTimeSelectionTable (autoPtr, coordinateSystem, registry,(const objectRegistry &obr, const dictionary &dict),(obr, dict)) | |
| virtual | ~coordinateSystem ()=default |
| virtual bool | valid () const |
| virtual bool | uniform () const |
| virtual const coordinateRotation & | rotation () const |
| virtual const word & | name () const |
| virtual const string & | note () const |
| virtual const point & | origin () const |
| virtual const tensor & | R () const |
| virtual const vector | e1 () const |
| virtual const vector | e2 () const |
| virtual const vector | e3 () const |
| virtual void | rename (const word &newName) |
| virtual string & | note () |
| virtual point & | origin () |
| virtual void | clear () |
| virtual void | rotation (autoPtr< coordinateRotation > &&crot) |
| virtual void | write (Ostream &os) const |
| virtual void | writeEntry (const word &keyword, Ostream &os) const |
| void | operator= (const coordinateSystem &csys) |
| void | operator= (coordinateSystem &&csys) |
| void | operator= (const autoPtr< coordinateSystem > &csys) |
| void | operator= (autoPtr< coordinateSystem > &&csys) |
| virtual tensor | R (const point &global) const |
| virtual tmp< tensorField > | R (const UList< point > &global) const |
| virtual tmp< tensorField > | R (const pointUIndList &global) const |
| point | transformPoint (const point &localCart) const |
| tmp< pointField > | transformPoint (const UList< point > &localCart) const |
| tmp< pointField > | transformPoint (const pointUIndList &localCart) const |
| point | invTransformPoint (const point &global) const |
| tmp< pointField > | invTransformPoint (const UList< point > &global) const |
| tmp< pointField > | invTransformPoint (const pointUIndList &global) const |
| point | globalPosition (const point &local) const |
| tmp< pointField > | globalPosition (const pointField &local) const |
| point | localPosition (const point &global) const |
| tmp< pointField > | localPosition (const pointField &global) const |
| vector | globalVector (const vector &local) const |
| tmp< vectorField > | globalVector (const vectorField &local) const |
| vector | localVector (const vector &global) const |
| tmp< vectorField > | localVector (const vectorField &global) const |
| virtual symmTensor | transformPrincipal (const vector &input) const |
| With constant rotation tensor. More... | |
| virtual tmp< Field< symmTensor > > | transformPrincipal (const UList< vector > &input) const |
| With constant rotation tensor. More... | |
| virtual symmTensor | transformPrincipal (const point &global, const vector &input) const |
| With rotation tensor at given global position. More... | |
| virtual tmp< Field< symmTensor > > | transformPrincipal (const UList< point > &global, const vector &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< symmTensor > > | transformPrincipal (const pointUIndList &global, const vector &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< symmTensor > > | transformPrincipal (const UList< point > &global, const UList< vector > &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< symmTensor > > | transformPrincipal (const pointUIndList &global, const UList< vector > &input) const |
| With rotation tensors at given global positions. More... | |
| virtual scalar | transform (const scalar &input) const |
| With constant rotation tensor. More... | |
| virtual tmp< Field< scalar > > | transform (const UList< scalar > &input) const |
| With constant rotation tensor. More... | |
| virtual scalar | transform (const point &global, const scalar &input) const |
| With rotation tensor at given global position. More... | |
| virtual tmp< Field< scalar > > | transform (const UList< point > &global, const scalar &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< scalar > > | transform (const pointUIndList &global, const scalar &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< scalar > > | transform (const UList< point > &global, const UList< scalar > &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< scalar > > | transform (const pointUIndList &global, const UList< scalar > &input) const |
| With rotation tensors at given global positions. More... | |
| virtual vector | transform (const vector &input) const |
| With constant rotation tensor. More... | |
| virtual tmp< Field< vector > > | transform (const UList< vector > &input) const |
| With constant rotation tensor. More... | |
| virtual vector | transform (const point &global, const vector &input) const |
| With rotation tensor at given global position. More... | |
| virtual tmp< Field< vector > > | transform (const UList< point > &global, const vector &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< vector > > | transform (const pointUIndList &global, const vector &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< vector > > | transform (const UList< point > &global, const UList< vector > &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< vector > > | transform (const pointUIndList &global, const UList< vector > &input) const |
| With rotation tensors at given global positions. More... | |
| virtual sphericalTensor | transform (const sphericalTensor &input) const |
| With constant rotation tensor. More... | |
| virtual tmp< Field< sphericalTensor > > | transform (const UList< sphericalTensor > &input) const |
| With constant rotation tensor. More... | |
| virtual sphericalTensor | transform (const point &global, const sphericalTensor &input) const |
| With rotation tensor at given global position. More... | |
| virtual tmp< Field< sphericalTensor > > | transform (const UList< point > &global, const sphericalTensor &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< sphericalTensor > > | transform (const pointUIndList &global, const sphericalTensor &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< sphericalTensor > > | transform (const UList< point > &global, const UList< sphericalTensor > &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< sphericalTensor > > | transform (const pointUIndList &global, const UList< sphericalTensor > &input) const |
| With rotation tensors at given global positions. More... | |
| virtual symmTensor | transform (const symmTensor &input) const |
| With constant rotation tensor. More... | |
| virtual tmp< Field< symmTensor > > | transform (const UList< symmTensor > &input) const |
| With constant rotation tensor. More... | |
| virtual symmTensor | transform (const point &global, const symmTensor &input) const |
| With rotation tensor at given global position. More... | |
| virtual tmp< Field< symmTensor > > | transform (const UList< point > &global, const symmTensor &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< symmTensor > > | transform (const pointUIndList &global, const symmTensor &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< symmTensor > > | transform (const UList< point > &global, const UList< symmTensor > &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< symmTensor > > | transform (const pointUIndList &global, const UList< symmTensor > &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tensor | transform (const tensor &input) const |
| With constant rotation tensor. More... | |
| virtual tmp< Field< tensor > > | transform (const UList< tensor > &input) const |
| With constant rotation tensor. More... | |
| virtual tensor | transform (const point &global, const tensor &input) const |
| With rotation tensor at given global position. More... | |
| virtual tmp< Field< tensor > > | transform (const UList< point > &global, const tensor &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< tensor > > | transform (const pointUIndList &global, const tensor &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< tensor > > | transform (const UList< point > &global, const UList< tensor > &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< tensor > > | transform (const pointUIndList &global, const UList< tensor > &input) const |
| With rotation tensors at given global positions. More... | |
| virtual scalar | invTransform (const scalar &input) const |
| With constant rotation tensor. More... | |
| virtual tmp< Field< scalar > > | invTransform (const UList< scalar > &input) const |
| With constant rotation tensor. More... | |
| virtual scalar | invTransform (const point &global, const scalar &input) const |
| With rotation tensor at given global position. More... | |
| virtual tmp< Field< scalar > > | invTransform (const UList< point > &global, const scalar &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< scalar > > | invTransform (const pointUIndList &global, const scalar &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< scalar > > | invTransform (const UList< point > &global, const UList< scalar > &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< scalar > > | invTransform (const pointUIndList &global, const UList< scalar > &input) const |
| With rotation tensors at given global positions. More... | |
| virtual vector | invTransform (const vector &input) const |
| With constant rotation tensor. More... | |
| virtual tmp< Field< vector > > | invTransform (const UList< vector > &input) const |
| With constant rotation tensor. More... | |
| virtual vector | invTransform (const point &global, const vector &input) const |
| With rotation tensor at given global position. More... | |
| virtual tmp< Field< vector > > | invTransform (const UList< point > &global, const vector &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< vector > > | invTransform (const pointUIndList &global, const vector &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< vector > > | invTransform (const UList< point > &global, const UList< vector > &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< vector > > | invTransform (const pointUIndList &global, const UList< vector > &input) const |
| With rotation tensors at given global positions. More... | |
| virtual sphericalTensor | invTransform (const sphericalTensor &input) const |
| With constant rotation tensor. More... | |
| virtual tmp< Field< sphericalTensor > > | invTransform (const UList< sphericalTensor > &input) const |
| With constant rotation tensor. More... | |
| virtual sphericalTensor | invTransform (const point &global, const sphericalTensor &input) const |
| With rotation tensor at given global position. More... | |
| virtual tmp< Field< sphericalTensor > > | invTransform (const UList< point > &global, const sphericalTensor &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< sphericalTensor > > | invTransform (const pointUIndList &global, const sphericalTensor &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< sphericalTensor > > | invTransform (const UList< point > &global, const UList< sphericalTensor > &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< sphericalTensor > > | invTransform (const pointUIndList &global, const UList< sphericalTensor > &input) const |
| With rotation tensors at given global positions. More... | |
| virtual symmTensor | invTransform (const symmTensor &input) const |
| With constant rotation tensor. More... | |
| virtual tmp< Field< symmTensor > > | invTransform (const UList< symmTensor > &input) const |
| With constant rotation tensor. More... | |
| virtual symmTensor | invTransform (const point &global, const symmTensor &input) const |
| With rotation tensor at given global position. More... | |
| virtual tmp< Field< symmTensor > > | invTransform (const UList< point > &global, const symmTensor &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< symmTensor > > | invTransform (const pointUIndList &global, const symmTensor &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< symmTensor > > | invTransform (const UList< point > &global, const UList< symmTensor > &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< symmTensor > > | invTransform (const pointUIndList &global, const UList< symmTensor > &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tensor | invTransform (const tensor &input) const |
| With constant rotation tensor. More... | |
| virtual tmp< Field< tensor > > | invTransform (const UList< tensor > &input) const |
| With constant rotation tensor. More... | |
| virtual tensor | invTransform (const point &global, const tensor &input) const |
| With rotation tensor at given global position. More... | |
| virtual tmp< Field< tensor > > | invTransform (const UList< point > &global, const tensor &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< tensor > > | invTransform (const pointUIndList &global, const tensor &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< tensor > > | invTransform (const UList< point > &global, const UList< tensor > &input) const |
| With rotation tensors at given global positions. More... | |
| virtual tmp< Field< tensor > > | invTransform (const pointUIndList &global, const UList< tensor > &input) const |
| With rotation tensors at given global positions. More... | |
| template<class PointField > | |
| Foam::tmp< Foam::tensorField > | rotationsImpl (const PointField &global) const |
| template<class PointField > | |
| Foam::tmp< Foam::pointField > | transformPointImpl (const PointField &localCart) const |
| template<class PointField > | |
| Foam::tmp< Foam::pointField > | invTransformPointImpl (const PointField &global) const |
| template<class RetType , class Type , class BinaryOp > | |
| Foam::tmp< Foam::Field< RetType > > | manyTimesImpl (const tensor &tt, const UList< Type > &input, const BinaryOp &bop) |
| template<class RetType , class PointField , class Type , class BinaryOp > | |
| Foam::tmp< Foam::Field< RetType > > | oneToOneImpl (const PointField &global, const UList< Type > &input, const BinaryOp &bop) const |
| template<class RetType , class PointField , class Type , class BinaryOp > | |
| Foam::tmp< Foam::Field< RetType > > | oneToManyImpl (const PointField &global, const Type &input, const BinaryOp &bop) const |
Static Public Member Functions | |
| static autoPtr< coordinateSystem > | New (word modelType, const objectRegistry &obr, const dictionary &dict) |
| static autoPtr< coordinateSystem > | New (word modelType, const dictionary &dict) |
| static autoPtr< coordinateSystem > | New (const objectRegistry &obr, const dictionary &dict, const word &dictName="") |
| static autoPtr< coordinateSystem > | New (const dictionary &dict, const word &dictName="") |
| static autoPtr< coordinateSystem > | New (Istream &is) |
Protected Member Functions | |
| template<class PointField > | |
| tmp< tensorField > | rotationsImpl (const PointField &global) const |
| template<class PointField > | |
| tmp< pointField > | transformPointImpl (const PointField &localCart) const |
| template<class PointField > | |
| tmp< pointField > | invTransformPointImpl (const PointField &global) const |
| template<class RetType , class PointField , class Type , class BinaryOp > | |
| tmp< Field< RetType > > | oneToOneImpl (const PointField &global, const UList< Type > &input, const BinaryOp &bop) const |
| template<class RetType , class PointField , class Type , class BinaryOp > | |
| tmp< Field< RetType > > | oneToManyImpl (const PointField &global, const Type &input, const BinaryOp &bop) const |
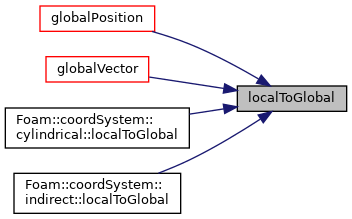
| virtual vector | localToGlobal (const vector &local, bool translate) const |
| virtual tmp< vectorField > | localToGlobal (const vectorField &local, bool translate) const |
| virtual vector | globalToLocal (const vector &global, bool translate) const |
| virtual tmp< vectorField > | globalToLocal (const vectorField &global, bool translate) const |
| void | assign (const dictionary &dict) |
| coordinateSystem (std::nullptr_t) | |
Static Protected Member Functions | |
| template<class RetType , class Type , class BinaryOp > | |
| static tmp< Field< RetType > > | manyTimesImpl (const tensor &tt, const UList< Type > &input, const BinaryOp &bop) |
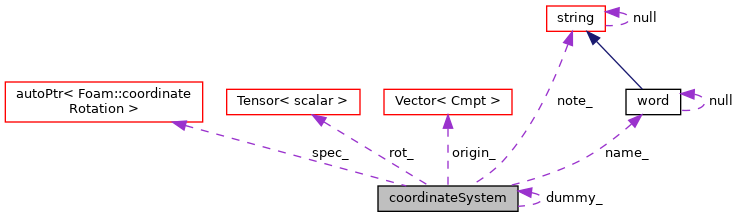
Protected Attributes | |
| autoPtr< coordinateRotation > | spec_ |
| point | origin_ |
| tensor | rot_ |
| word | name_ |
| string | note_ |
Static Protected Attributes | |
| static coordinateSystem | dummy_ |
Base class for coordinate system specification, the default coordinate system type is cartesian .
All systems are defined by an origin point and a coordinate rotation By default, the axes specification can be used directly as part of the coordinate system specification. For example,
coordinateSystem
{
origin (0 0 0);
e1 (0 1 0);
e3 (1 0 0);
}
The same, but in more verbose format:
coordinateSystem
{
type cartesian;
origin (0 0 0);
rotation
{
type axes;
e1 (0 1 0);
e3 (1 0 0);
}
}
For an identity rotation, can use a slightly more compact format:
coordinateSystem
{
type cartesian;
origin (0 0 0);
rotation none;
}
Types of coordinateRotation:
Type of coordinateSystem:
Definition at line 129 of file coordinateSystem.H.
|
protected |
Definition at line 100 of file coordinateSystem.C.
| coordinateSystem | ( | ) |
Definition at line 110 of file coordinateSystem.C.
|
explicit |
Definition at line 120 of file coordinateSystem.C.
|
explicit |
Definition at line 126 of file coordinateSystem.C.
| coordinateSystem | ( | const coordinateSystem & | csys | ) |
Definition at line 132 of file coordinateSystem.C.
| coordinateSystem | ( | coordinateSystem && | csys | ) |
Definition at line 142 of file coordinateSystem.C.
|
explicit |
Definition at line 152 of file coordinateSystem.C.
References coordinateSystem::operator=(), and coordinateSystem::spec_.

| coordinateSystem | ( | const word & | name, |
| const coordinateSystem & | csys | ||
| ) |
Definition at line 171 of file coordinateSystem.C.
| coordinateSystem | ( | const point & | origin, |
| const coordinateRotation & | crot | ||
| ) |
Definition at line 185 of file coordinateSystem.C.
| coordinateSystem | ( | const point & | origin, |
| const vector & | axis, | ||
| const vector & | dirn | ||
| ) |
Definition at line 210 of file coordinateSystem.C.
| coordinateSystem | ( | const word & | name, |
| const point & | origin, | ||
| const coordinateRotation & | crot | ||
| ) |
Definition at line 195 of file coordinateSystem.C.
| coordinateSystem | ( | const word & | name, |
| const point & | origin, | ||
| const vector & | axis, | ||
| const vector & | dirn | ||
| ) |
Definition at line 221 of file coordinateSystem.C.
| coordinateSystem | ( | const word & | name, |
| const dictionary & | dict | ||
| ) |
Definition at line 237 of file coordinateSystem.C.
References Foam::FieldOps::assign(), and dict.

|
explicit |
Definition at line 252 of file coordinateSystem.C.
| coordinateSystem | ( | const dictionary & | dict, |
| const word & | dictName | ||
| ) |
Definition at line 259 of file coordinateSystem.C.
References Foam::FieldOps::assign(), dict, dictName(), and dictionary::subDict().
|
virtualdefault |
|
protected |
|
protected |
|
protected |
|
staticprotected |
|
protected |
|
protected |
|
protectedvirtual |
Reimplemented in indirect, and cylindrical.
Definition at line 331 of file coordinateSystem.C.
References Foam::transform().
Referenced by coordinateSystem::globalPosition(), coordinateSystem::globalVector(), cylindrical::localToGlobal(), and indirect::localToGlobal().

|
protectedvirtual |
Reimplemented in indirect, and cylindrical.
Definition at line 346 of file coordinateSystem.C.
References Foam::transform().

|
protectedvirtual |
Reimplemented in indirect, and cylindrical.
Definition at line 361 of file coordinateSystem.C.
References Foam::invTransform().
Referenced by cylindrical::globalToLocal(), indirect::globalToLocal(), coordinateSystem::localPosition(), and coordinateSystem::localVector().

|
protectedvirtual |
Reimplemented in indirect, and cylindrical.
Definition at line 376 of file coordinateSystem.C.
References Foam::invTransform().

|
protected |
Definition at line 63 of file coordinateSystem.C.
References dict, keyType::LITERAL, coordinateRotation::New(), coordinateSystem::note_, coordinateSystem::origin_, coordinateSystem::rot_, and coordinateSystem::spec_.

| TypeName | ( | "coordinateSystem" | ) |
|
inlinevirtual |
Reimplemented in cylindrical, indirect, and cartesian.
Definition at line 339 of file coordinateSystem.H.
References autoPtr::New().

| declareRunTimeSelectionTable | ( | autoPtr | , |
| coordinateSystem | , | ||
| dictionary | , | ||
| (const dictionary &dict) | , | ||
| (dict) | |||
| ) |
| declareRunTimeSelectionTable | ( | autoPtr | , |
| coordinateSystem | , | ||
| registry | , | ||
| (const objectRegistry &obr, const dictionary &dict) | , | ||
| (obr, dict) | |||
| ) |
|
static |
Definition at line 80 of file coordinateSystemNew.C.
References dict, Foam::exit(), Foam::FatalIOError, and FatalIOErrorInLookup.
Referenced by mixerFvMesh::mixerFvMesh(), coordinateSystem::New(), coordinateSystem::iNew::operator()(), jouleHeatingSource::read(), regionSizeDistribution::read(), sampledPlane::sampledPlane(), and forces::setCoordinateSystem().

|
static |
Definition at line 119 of file coordinateSystemNew.C.
References dict, Foam::exit(), Foam::FatalIOError, and FatalIOErrorInLookup.

|
static |
Definition at line 147 of file coordinateSystemNew.C.
References dict, dictName(), dictionary::getOrDefault(), coordinateSystem::New(), and dictionary::subDict().
|
static |
Definition at line 176 of file coordinateSystemNew.C.
References dict, dictName(), dictionary::getOrDefault(), coordinateSystem::New(), and dictionary::subDict().
|
static |
Definition at line 203 of file coordinateSystemNew.C.
References dict, coordinateSystem::New(), and word::null.
|
inlinevirtual |
Reimplemented in indirect.
Definition at line 436 of file coordinateSystem.H.
References bool, and coordinateSystem::spec_.
Referenced by indirect::valid().

Reimplemented in cylindrical, and indirect.
Definition at line 442 of file coordinateSystem.H.
Referenced by indirect::uniform().

|
inlinevirtual |
Reimplemented in indirect.
Definition at line 448 of file coordinateSystem.H.
References coordinateSystem::spec_.
Referenced by indirect::rotation().

|
inlinevirtual |
Reimplemented in indirect.
Definition at line 454 of file coordinateSystem.H.
References coordinateSystem::name_.
|
inlinevirtual |
Reimplemented in indirect.
Definition at line 460 of file coordinateSystem.H.
References coordinateSystem::note_.
Referenced by indirect::note().

|
inlinevirtual |
Reimplemented in indirect.
Definition at line 466 of file coordinateSystem.H.
References coordinateSystem::origin_.
Referenced by Foam::operator!=(), indirect::origin(), and propellerInfo::setSampleDiskGeometry().
|
inlinevirtual |
Reimplemented in indirect.
Definition at line 472 of file coordinateSystem.H.
References coordinateSystem::rot_.
Referenced by Foam::operator!=(), indirect::R(), and coordinateSystem::rotationsImpl().

|
inlinevirtual |
Reimplemented in indirect.
Definition at line 478 of file coordinateSystem.H.
References Tensor::cx(), and coordinateSystem::rot_.
Referenced by indirect::e1().

|
inlinevirtual |
Reimplemented in indirect.
Definition at line 484 of file coordinateSystem.H.
References Tensor::cy(), and coordinateSystem::rot_.
Referenced by indirect::e2().

|
inlinevirtual |
Reimplemented in indirect.
Definition at line 490 of file coordinateSystem.H.
References Tensor::cz(), and coordinateSystem::rot_.
Referenced by indirect::e3().

|
inlinevirtual |
Reimplemented in indirect.
Definition at line 499 of file coordinateSystem.H.
References coordinateSystem::name_.
|
inlinevirtual |
Reimplemented in indirect.
Definition at line 505 of file coordinateSystem.H.
References coordinateSystem::note_.
|
inlinevirtual |
Reimplemented in indirect.
Definition at line 511 of file coordinateSystem.H.
References coordinateSystem::origin_.
|
virtual |
Reimplemented in indirect.
Definition at line 279 of file coordinateSystem.C.
References SphericalTensor< scalar >::I, and Foam::Zero.
Referenced by coordinateSystem::operator=().

|
virtual |
Reimplemented in indirect.
Definition at line 390 of file coordinateSystem.C.
References SphericalTensor< scalar >::I, and coordinateRotation::R().

|
virtual |
Reimplemented in indirect.
Definition at line 404 of file coordinateSystem.C.
References Foam::isCartesian(), os(), Foam::type(), and OBJstream::write().
Referenced by Foam::operator<<().

Reimplemented in indirect.
Definition at line 422 of file coordinateSystem.C.
References Ostream::beginBlock(), Ostream::endBlock(), Foam::isCartesian(), os(), Foam::type(), and Ostream::writeEntry().
| void operator= | ( | const coordinateSystem & | csys | ) |
Definition at line 461 of file coordinateSystem.C.
References SphericalTensor< scalar >::I, coordinateSystem::name_, coordinateSystem::note_, coordinateSystem::origin_, and coordinateSystem::spec_.
Referenced by coordinateSystem::coordinateSystem(), and coordinateSystem::operator=().
| void operator= | ( | coordinateSystem && | csys | ) |
Definition at line 480 of file coordinateSystem.C.
References coordinateSystem::name_, coordinateSystem::note_, coordinateSystem::origin_, coordinateSystem::rot_, and coordinateSystem::spec_.
| void operator= | ( | const autoPtr< coordinateSystem > & | csys | ) |
Definition at line 490 of file coordinateSystem.C.
References coordinateSystem::operator=().

| void operator= | ( | autoPtr< coordinateSystem > && | csys | ) |
Definition at line 496 of file coordinateSystem.C.
References coordinateSystem::clear(), and coordinateSystem::operator=().

|
virtual |
Reimplemented in indirect, and cylindrical.
Definition at line 288 of file coordinateSystem.C.
|
virtual |
Reimplemented in indirect.
Definition at line 295 of file coordinateSystem.C.
|
virtual |
Reimplemented in indirect.
Definition at line 304 of file coordinateSystem.C.
| Foam::point transformPoint | ( | const point & | localCart | ) | const |
Definition at line 313 of file coordinateSystem.C.
References Foam::transform().

| Foam::tmp< Foam::pointField > transformPoint | ( | const UList< point > & | localCart | ) | const |
Definition at line 94 of file coordinateSystemTransform.C.
| Foam::tmp< Foam::pointField > transformPoint | ( | const pointUIndList & | localCart | ) | const |
Definition at line 103 of file coordinateSystemTransform.C.
| Foam::point invTransformPoint | ( | const point & | global | ) | const |
Definition at line 322 of file coordinateSystem.C.
References Foam::invTransform().

| Foam::tmp< Foam::pointField > invTransformPoint | ( | const UList< point > & | global | ) | const |
Definition at line 112 of file coordinateSystemTransform.C.
| Foam::tmp< Foam::pointField > invTransformPoint | ( | const pointUIndList & | global | ) | const |
Definition at line 121 of file coordinateSystemTransform.C.
Definition at line 592 of file coordinateSystem.H.
References coordinateSystem::localToGlobal().
Referenced by sampledPlane::sampledPlane(), and propellerInfo::setSampleDiskGeometry().

|
inline |
Definition at line 598 of file coordinateSystem.H.
References coordinateSystem::localToGlobal().

Definition at line 604 of file coordinateSystem.H.
References coordinateSystem::globalToLocal().

|
inline |
Definition at line 610 of file coordinateSystem.H.
References coordinateSystem::globalToLocal().

Definition at line 618 of file coordinateSystem.H.
References coordinateSystem::localToGlobal().
Referenced by sampledPlane::sampledPlane().


|
inline |
Definition at line 624 of file coordinateSystem.H.
References coordinateSystem::localToGlobal().

Definition at line 630 of file coordinateSystem.H.
References coordinateSystem::globalToLocal().

|
inline |
Definition at line 636 of file coordinateSystem.H.
References coordinateSystem::globalToLocal().

|
virtual |
With constant rotation tensor.
Definition at line 195 of file coordinateSystemTransform.C.
|
virtual |
With constant rotation tensor.
Definition at line 195 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensor at given global position.
Definition at line 195 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 195 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 195 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 195 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 195 of file coordinateSystemTransform.C.
|
virtual |
With constant rotation tensor.
Definition at line 197 of file coordinateSystemTransform.C.
Referenced by DarcyForchheimer::calcTransformModelData().

|
virtual |
With constant rotation tensor.
Definition at line 197 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensor at given global position.
Definition at line 197 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 197 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 197 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 197 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 197 of file coordinateSystemTransform.C.
|
virtual |
With constant rotation tensor.
Definition at line 198 of file coordinateSystemTransform.C.
|
virtual |
With constant rotation tensor.
Definition at line 198 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensor at given global position.
Definition at line 198 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 198 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 198 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 198 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 198 of file coordinateSystemTransform.C.
|
virtual |
With constant rotation tensor.
Definition at line 199 of file coordinateSystemTransform.C.
|
virtual |
With constant rotation tensor.
Definition at line 199 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensor at given global position.
Definition at line 199 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 199 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 199 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 199 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 199 of file coordinateSystemTransform.C.
|
virtual |
With constant rotation tensor.
Definition at line 200 of file coordinateSystemTransform.C.
|
virtual |
With constant rotation tensor.
Definition at line 200 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensor at given global position.
Definition at line 200 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 200 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 200 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 200 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 200 of file coordinateSystemTransform.C.
|
virtual |
With constant rotation tensor.
Definition at line 201 of file coordinateSystemTransform.C.
|
virtual |
With constant rotation tensor.
Definition at line 201 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensor at given global position.
Definition at line 201 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 201 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 201 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 201 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 201 of file coordinateSystemTransform.C.
|
virtual |
With constant rotation tensor.
Definition at line 203 of file coordinateSystemTransform.C.
|
virtual |
With constant rotation tensor.
Definition at line 203 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensor at given global position.
Definition at line 203 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 203 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 203 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 203 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 203 of file coordinateSystemTransform.C.
|
virtual |
With constant rotation tensor.
Definition at line 204 of file coordinateSystemTransform.C.
|
virtual |
With constant rotation tensor.
Definition at line 204 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensor at given global position.
Definition at line 204 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 204 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 204 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 204 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 204 of file coordinateSystemTransform.C.
|
virtual |
With constant rotation tensor.
Definition at line 205 of file coordinateSystemTransform.C.
|
virtual |
With constant rotation tensor.
Definition at line 205 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensor at given global position.
Definition at line 205 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 205 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 205 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 205 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 205 of file coordinateSystemTransform.C.
|
virtual |
With constant rotation tensor.
Definition at line 206 of file coordinateSystemTransform.C.
|
virtual |
With constant rotation tensor.
Definition at line 206 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensor at given global position.
Definition at line 206 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 206 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 206 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 206 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 206 of file coordinateSystemTransform.C.
|
virtual |
With constant rotation tensor.
Definition at line 207 of file coordinateSystemTransform.C.
|
virtual |
With constant rotation tensor.
Definition at line 207 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensor at given global position.
Definition at line 207 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 207 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 207 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 207 of file coordinateSystemTransform.C.
|
virtual |
With rotation tensors at given global positions.
Definition at line 207 of file coordinateSystemTransform.C.
| Foam::tmp<Foam::tensorField> rotationsImpl | ( | const PointField & | global | ) | const |
Definition at line 28 of file coordinateSystemTemplates.C.
References tmp::New(), and coordinateSystem::R().
| Foam::tmp<Foam::pointField> transformPointImpl | ( | const PointField & | localCart | ) | const |
Definition at line 46 of file coordinateSystemTemplates.C.
References tmp::New(), and Foam::transform().

| Foam::tmp<Foam::pointField> invTransformPointImpl | ( | const PointField & | global | ) | const |
Definition at line 64 of file coordinateSystemTemplates.C.
References Foam::invTransform(), and tmp::New().
| Foam::tmp<Foam::Field<RetType> > manyTimesImpl | ( | const tensor & | tt, |
| const UList< Type > & | input, | ||
| const BinaryOp & | bop | ||
| ) |
Definition at line 83 of file coordinateSystemTemplates.C.
References Foam::input(), and Foam::New().
| Foam::tmp<Foam::Field<RetType> > oneToOneImpl | ( | const PointField & | global, |
| const UList< Type > & | input, | ||
| const BinaryOp & | bop | ||
| ) | const |
Definition at line 106 of file coordinateSystemTemplates.C.
References Foam::abort(), Foam::FatalError, FatalErrorInFunction, Foam::input(), Foam::New(), and R.

| Foam::tmp<Foam::Field<RetType> > oneToManyImpl | ( | const PointField & | global, |
| const Type & | input, | ||
| const BinaryOp & | bop | ||
| ) | const |
Definition at line 136 of file coordinateSystemTemplates.C.
References Foam::input(), Foam::New(), and R.
|
protected |
Definition at line 147 of file coordinateSystem.H.
Referenced by coordinateSystem::assign(), coordinateSystem::coordinateSystem(), coordinateSystem::operator=(), coordinateSystem::rotation(), and coordinateSystem::valid().
|
protected |
Definition at line 150 of file coordinateSystem.H.
Referenced by coordinateSystem::assign(), coordinateSystem::operator=(), and coordinateSystem::origin().
|
protected |
Definition at line 153 of file coordinateSystem.H.
Referenced by coordinateSystem::assign(), coordinateSystem::e1(), coordinateSystem::e2(), coordinateSystem::e3(), coordinateSystem::operator=(), and coordinateSystem::R().
|
protected |
Definition at line 156 of file coordinateSystem.H.
Referenced by indirect::name(), coordinateSystem::name(), coordinateSystem::operator=(), and coordinateSystem::rename().
|
protected |
Definition at line 159 of file coordinateSystem.H.
Referenced by coordinateSystem::assign(), coordinateSystem::note(), and coordinateSystem::operator=().
|
staticprotected |
Definition at line 162 of file coordinateSystem.H.
Referenced by indirect::note(), and indirect::origin().
Copyright © 2011-2018 OpenFOAM | OPENFOAM® is a registered trademark of OpenCFD Ltd.
Generated by
 1.8.17
1.8.17
