Public Member Functions | |
| surfaceOptimizer (DynList< point > &pts, const DynList< triFace > &trias) | |
| Construct from transformed points and triangles forming a simplex. More... | |
| ~surfaceOptimizer () | |
| point | optimizePoint (const scalar tol=0.1) |
| optimizes position of a central point in the simplex More... | |
Private Member Functions | |
| scalar | evaluateStabilisationFactor () const |
| evaluate stabilisation factor More... | |
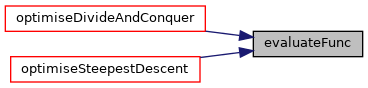
| scalar | evaluateFunc (const scalar &K) const |
| evaluate the functional More... | |
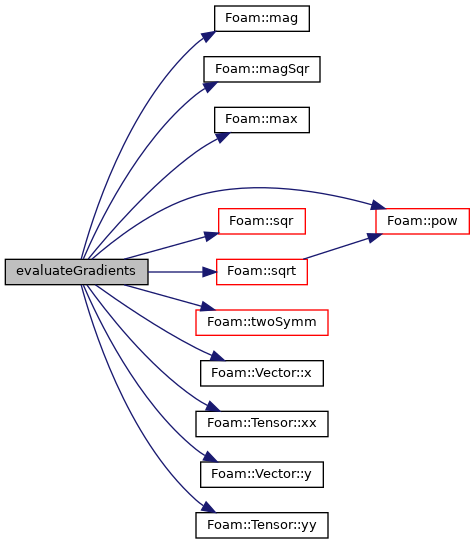
| void | evaluateGradients (const scalar &, vector &, tensor &) const |
| evaluate gradients needed for optimisation More... | |
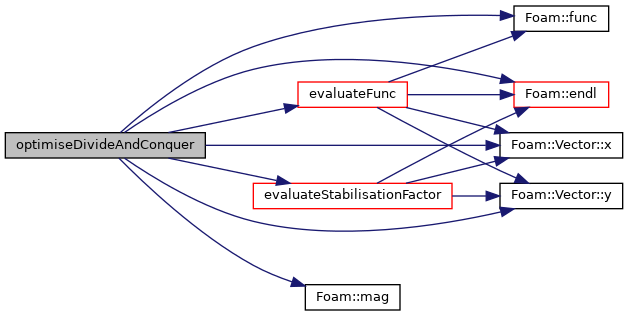
| scalar | optimiseDivideAndConquer (const scalar tol) |
| optimise point position using the divide and conquer technique More... | |
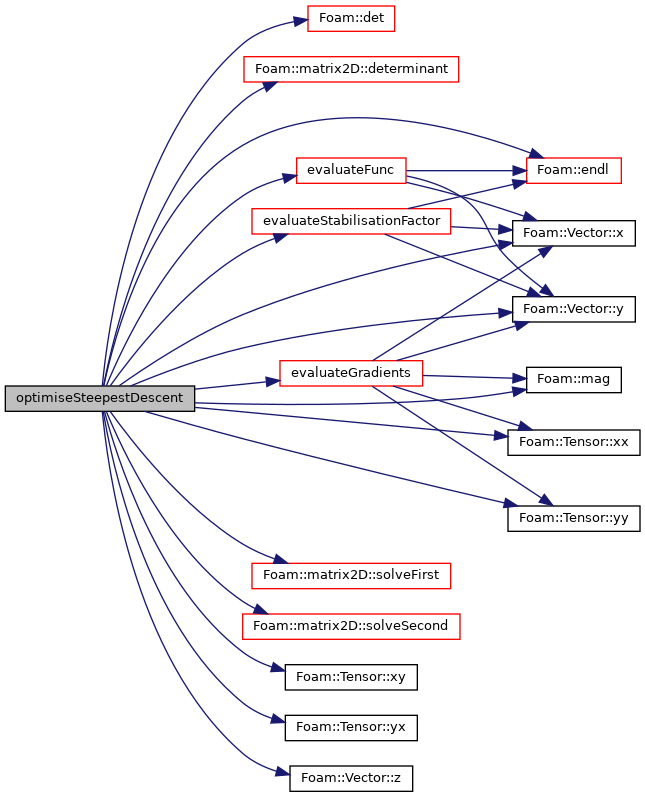
| scalar | optimiseSteepestDescent (const scalar tol) |
| optimise point position via the steepest descent method More... | |
| surfaceOptimizer (const surfaceOptimizer &) | |
| Disallow default bitwise copy construct. More... | |
| void | operator= (const surfaceOptimizer &) |
| Disallow default bitwise assignment. More... | |
Private Attributes | |
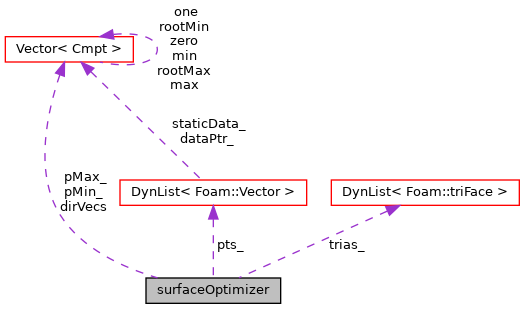
| DynList< point > & | pts_ |
| reference to the simplex points More... | |
| const DynList< triFace > & | trias_ |
| reference to the triangles forming a simplex More... | |
| point | pMin_ |
| min position of the bnd box More... | |
| point | pMax_ |
| max position of the bnd box More... | |
Static Private Attributes | |
| static const vector | dirVecs [4] |
| direction vectors for divide and conquer algorithm More... | |
Definition at line 50 of file surfaceOptimizer.H.
|
private |
Disallow default bitwise copy construct.
| surfaceOptimizer | ( | DynList< point > & | pts, |
| const DynList< triFace > & | trias | ||
| ) |
Construct from transformed points and triangles forming a simplex.
Definition at line 352 of file surfaceOptimizer.C.
References forAll, Foam::max(), Foam::min(), and tf.
| ~surfaceOptimizer | ( | ) |
Definition at line 377 of file surfaceOptimizer.C.
|
private |
evaluate stabilisation factor
find the minimum area
K is greater than zero in case the stabilisation is needed
Definition at line 51 of file surfaceOptimizer.C.
References Foam::endl(), forAll, Foam::Info, Foam::magSqr(), Foam::max(), Foam::min(), surfaceOptimizer::pts_, surfaceOptimizer::trias_, Vector< Cmpt >::x(), and Vector< Cmpt >::y().
Referenced by surfaceOptimizer::optimiseDivideAndConquer(), and surfaceOptimizer::optimiseSteepestDescent().

|
private |
evaluate the functional
Definition at line 97 of file surfaceOptimizer.C.
References Foam::endl(), forAll, Foam::func(), Foam::Info, Foam::magSqr(), Foam::max(), surfaceOptimizer::pts_, Foam::sqr(), Foam::sqrt(), surfaceOptimizer::trias_, Vector< Cmpt >::x(), and Vector< Cmpt >::y().
Referenced by surfaceOptimizer::optimiseDivideAndConquer(), and surfaceOptimizer::optimiseSteepestDescent().
evaluate gradients needed for optimisation
calculate the gradient
calculate the second gradient
stabilise diagonal terms
Definition at line 135 of file surfaceOptimizer.C.
References forAll, Foam::mag(), Foam::magSqr(), Foam::max(), Foam::pow(), Foam::sqr(), Foam::sqrt(), Foam::twoSymm(), Vector< Cmpt >::x(), Tensor::xx(), Vector< Cmpt >::y(), Tensor::yy(), Tensor::zero, and Vector< scalar >::zero.
Referenced by surfaceOptimizer::optimiseSteepestDescent().

|
private |
optimise point position using the divide and conquer technique
find the value of the functional in the centre of the bnd box
set the centre with the minimum value as the centre for future search
halve the search range
calculate the tolerence
Definition at line 208 of file surfaceOptimizer.C.
References surfaceOptimizer::dirVecs, Foam::endl(), surfaceOptimizer::evaluateFunc(), surfaceOptimizer::evaluateStabilisationFactor(), Foam::func(), Foam::Info, Foam::mag(), surfaceOptimizer::pMax_, surfaceOptimizer::pMin_, surfaceOptimizer::pts_, surfaceOptimizer::trias_, Vector< Cmpt >::x(), Vector< Cmpt >::y(), and Vector< scalar >::zero.
Referenced by surfaceOptimizer::optimizePoint().

|
private |
optimise point position via the steepest descent method
find the bounding box
find the minimum value on the 5 x 5 raster
start with steepest descent optimisation
store data into a matrix
calculate the determinant
Definition at line 271 of file surfaceOptimizer.C.
References Foam::det(), matrix2D::determinant(), Foam::endl(), surfaceOptimizer::evaluateFunc(), surfaceOptimizer::evaluateGradients(), surfaceOptimizer::evaluateStabilisationFactor(), Foam::Info, Foam::mag(), surfaceOptimizer::pMax_, surfaceOptimizer::pMin_, surfaceOptimizer::pts_, matrix2D::solveFirst(), matrix2D::solveSecond(), surfaceOptimizer::trias_, Vector< Cmpt >::x(), Tensor::xx(), Tensor::xy(), Vector< Cmpt >::y(), Tensor::yx(), Tensor::yy(), Vector< Cmpt >::z(), and Vector< scalar >::zero.
Referenced by surfaceOptimizer::optimizePoint().

|
private |
Disallow default bitwise assignment.
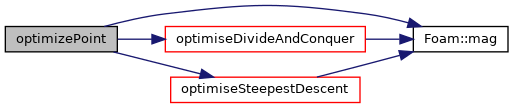
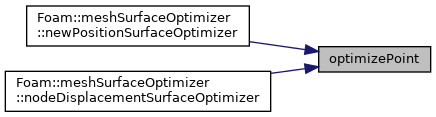
| point optimizePoint | ( | const scalar | tol = 0.1 | ) |
optimizes position of a central point in the simplex
Definition at line 382 of file surfaceOptimizer.C.
References forAll, Foam::mag(), surfaceOptimizer::optimiseDivideAndConquer(), surfaceOptimizer::optimiseSteepestDescent(), surfaceOptimizer::pMax_, surfaceOptimizer::pMin_, surfaceOptimizer::pts_, and surfaceOptimizer::trias_.
Referenced by meshSurfaceOptimizer::newPositionSurfaceOptimizer(), and meshSurfaceOptimizer::nodeDisplacementSurfaceOptimizer().
|
staticprivate |
direction vectors for divide and conquer algorithm
Definition at line 54 of file surfaceOptimizer.H.
Referenced by surfaceOptimizer::optimiseDivideAndConquer().
reference to the simplex points
Definition at line 58 of file surfaceOptimizer.H.
Referenced by surfaceOptimizer::evaluateFunc(), surfaceOptimizer::evaluateStabilisationFactor(), surfaceOptimizer::optimiseDivideAndConquer(), surfaceOptimizer::optimiseSteepestDescent(), and surfaceOptimizer::optimizePoint().
reference to the triangles forming a simplex
Definition at line 61 of file surfaceOptimizer.H.
Referenced by surfaceOptimizer::evaluateFunc(), surfaceOptimizer::evaluateStabilisationFactor(), surfaceOptimizer::optimiseDivideAndConquer(), surfaceOptimizer::optimiseSteepestDescent(), and surfaceOptimizer::optimizePoint().
|
private |
min position of the bnd box
Definition at line 64 of file surfaceOptimizer.H.
Referenced by surfaceOptimizer::optimiseDivideAndConquer(), surfaceOptimizer::optimiseSteepestDescent(), and surfaceOptimizer::optimizePoint().
|
private |
max position of the bnd box
Definition at line 67 of file surfaceOptimizer.H.
Referenced by surfaceOptimizer::optimiseDivideAndConquer(), surfaceOptimizer::optimiseSteepestDescent(), and surfaceOptimizer::optimizePoint().
Copyright © 2011-2018 OpenFOAM | OPENFOAM® is a registered trademark of OpenCFD Ltd.
Generated by
 1.8.17
1.8.17
