A coordinateRotation defined in the z-x-y Euler convention. More...


Public Member Functions | |
| TypeName ("EulerRotation") | |
| Runtime type information. More... | |
| EulerCoordinateRotation () | |
| Construct null. More... | |
| EulerCoordinateRotation (const vector &phiThetaPsi, const bool inDegrees=true) | |
| Construct from rotation vector. More... | |
| EulerCoordinateRotation (const scalar phiAngle, const scalar thetaAngle, const scalar psiAngle, const bool inDegrees=true) | |
| Construct from components of rotation vector. More... | |
| EulerCoordinateRotation (const dictionary &) | |
| Construct from dictionary. More... | |
| EulerCoordinateRotation (const dictionary &, const objectRegistry &) | |
| Construct from dictionary and mesh. More... | |
| EulerCoordinateRotation (const EulerCoordinateRotation &) | |
| Construct as copy. More... | |
| autoPtr< coordinateRotation > | clone () const |
| Return clone. More... | |
| virtual void | clear () |
| Reset rotation to an identity rotation. More... | |
| virtual void | updateCells (const polyMesh &, const labelList &) |
| Update the rotation for a list of cells. More... | |
| virtual const tensor & | R () const |
| Return local-to-global transformation tensor. More... | |
| virtual const tensor & | Rtr () const |
| Return global-to-local transformation tensor. More... | |
| virtual const vector | e1 () const |
| Return local Cartesian x-axis. More... | |
| virtual const vector | e2 () const |
| Return local Cartesian y-axis. More... | |
| virtual const vector | e3 () const |
| Return local Cartesian z-axis. More... | |
| virtual const tensorField & | Tr () const |
| Return transformation tensor field. More... | |
| virtual tmp< vectorField > | transform (const vectorField &st) const |
| Transform vectorField using transformation tensor field. More... | |
| virtual vector | transform (const vector &st) const |
| Transform vector using transformation tensor. More... | |
| virtual tmp< vectorField > | invTransform (const vectorField &st) const |
| Inverse transform vectorField using transformation tensor field. More... | |
| virtual vector | invTransform (const vector &st) const |
| Inverse transform vector using transformation tensor. More... | |
| virtual tmp< tensorField > | transformTensor (const tensorField &st) const |
| Transform tensor field using transformation tensorField. More... | |
| virtual tensor | transformTensor (const tensor &st) const |
| Transform tensor using transformation tensorField. More... | |
| virtual tmp< tensorField > | transformTensor (const tensorField &st, const labelList &cellMap) const |
| Transform tensor sub-field using transformation tensorField. More... | |
| virtual tmp< symmTensorField > | transformVector (const vectorField &st) const |
| Transform vectorField using transformation tensorField and return. More... | |
| virtual symmTensor | transformVector (const vector &st) const |
| Transform vector using transformation tensor and return. More... | |
| virtual void | write (Ostream &) const |
| Write. More... | |
 Public Member Functions inherited from coordinateRotation Public Member Functions inherited from coordinateRotation | |
| TypeName ("coordinateRotation") | |
| Runtime type information. More... | |
| declareRunTimeSelectionTable (autoPtr, coordinateRotation, objectRegistry,(const dictionary &dict, const objectRegistry &obr),(dict, obr)) | |
| declareRunTimeSelectionTable (autoPtr, coordinateRotation, dictionary,(const dictionary &dict),(dict)) | |
| virtual | ~coordinateRotation () |
| Destructor. More... | |
| virtual bool | uniform () const |
| Return true if the rotation tensor is uniform. More... | |
Private Member Functions | |
| void | calcTransform (const scalar phiAngle, const scalar thetaAngle, const scalar psiAngle, const bool inDegrees=true) |
| Calculate transformation tensor. More... | |
Private Attributes | |
| tensor | R_ |
| Local-to-global transformation tensor. More... | |
| tensor | Rtr_ |
| Global-to-Local transformation tensor. More... | |
Additional Inherited Members | |
| Static Public Member Functions inherited from coordinateRotation | |
| static autoPtr< coordinateRotation > | New (const dictionary &dict, const objectRegistry &obr) |
| Select constructed from dictionary and objectRegistry. More... | |
| static autoPtr< coordinateRotation > | New (const dictionary &dict) |
| Select constructed from dictionary. More... | |
| Protected Member Functions inherited from coordinateRotation | |
| symmTensor | transformPrincipal (const tensor &, const vector &) const |
| Transform principal. More... | |
A coordinateRotation defined in the z-x-y Euler convention.
The 3 rotations are defined in the Euler convention (around Z, around X' and around Z'). For reference and illustration, see http://mathworld.wolfram.com/EulerAngles.html Note, however, that it is the reverse transformation (local->global) that is defined here.
coordinateRotation
{
type EulerRotation
degrees false;
rotation (0 0 3.141592654);
}
Definition at line 63 of file EulerCoordinateRotation.H.
Construct null.
Definition at line 195 of file EulerCoordinateRotation.C.
| EulerCoordinateRotation | ( | const vector & | phiThetaPsi, |
| const bool | inDegrees = true |
||
| ) |
Construct from rotation vector.
Definition at line 203 of file EulerCoordinateRotation.C.
References VectorSpace::component(), Vector< scalar >::X, Vector< scalar >::Y, and Vector< scalar >::Z.

| EulerCoordinateRotation | ( | const scalar | phiAngle, |
| const scalar | thetaAngle, | ||
| const scalar | psiAngle, | ||
| const bool | inDegrees = true |
||
| ) |
Construct from components of rotation vector.
Definition at line 222 of file EulerCoordinateRotation.C.
| EulerCoordinateRotation | ( | const dictionary & | dict | ) |
Construct from dictionary.
Definition at line 237 of file EulerCoordinateRotation.C.
References VectorSpace::component(), dict, dictionary::lookup(), dictionary::lookupOrDefault(), Vector< scalar >::X, Vector< scalar >::Y, and Vector< scalar >::Z.

| EulerCoordinateRotation | ( | const dictionary & | dict, |
| const objectRegistry & | |||
| ) |
Construct from dictionary and mesh.
Definition at line 257 of file EulerCoordinateRotation.C.
References VectorSpace::component(), dict, dictionary::lookup(), dictionary::lookupOrDefault(), Vector< scalar >::X, Vector< scalar >::Y, and Vector< scalar >::Z.

| EulerCoordinateRotation | ( | const EulerCoordinateRotation & | r | ) |
Construct as copy.
Definition at line 278 of file EulerCoordinateRotation.C.
|
private |
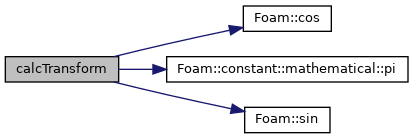
Calculate transformation tensor.
Definition at line 153 of file EulerCoordinateRotation.C.
References Foam::cos(), phi, Foam::constant::mathematical::pi(), psi, and Foam::sin().
| TypeName | ( | "EulerRotation" | ) |
Runtime type information.
|
inlinevirtual |
Return clone.
Implements coordinateRotation.
Definition at line 126 of file EulerCoordinateRotation.H.
|
inlinevirtual |
Reset rotation to an identity rotation.
Implements coordinateRotation.
Definition at line 141 of file EulerCoordinateRotation.H.
References SphericalTensor< Cmpt >::I, EulerCoordinateRotation::R_, and EulerCoordinateRotation::Rtr_.
Update the rotation for a list of cells.
Implements coordinateRotation.
Definition at line 148 of file EulerCoordinateRotation.H.
|
inlinevirtual |
Return local-to-global transformation tensor.
Implements coordinateRotation.
Definition at line 154 of file EulerCoordinateRotation.H.
References EulerCoordinateRotation::R_.
|
inlinevirtual |
Return global-to-local transformation tensor.
Implements coordinateRotation.
Definition at line 160 of file EulerCoordinateRotation.H.
References EulerCoordinateRotation::Rtr_.
|
inlinevirtual |
Return local Cartesian x-axis.
Implements coordinateRotation.
Definition at line 166 of file EulerCoordinateRotation.H.
References EulerCoordinateRotation::R_, and Tensor::x().

|
inlinevirtual |
Return local Cartesian y-axis.
Implements coordinateRotation.
Definition at line 172 of file EulerCoordinateRotation.H.
References EulerCoordinateRotation::R_, and Tensor::y().

|
inlinevirtual |
Return local Cartesian z-axis.
Implements coordinateRotation.
Definition at line 178 of file EulerCoordinateRotation.H.
References EulerCoordinateRotation::R_, and Tensor::z().

|
virtual |
Return transformation tensor field.
Implements coordinateRotation.
Definition at line 87 of file EulerCoordinateRotation.C.
References NotImplemented.
|
virtual |
Transform vectorField using transformation tensor field.
Implements coordinateRotation.
Definition at line 68 of file EulerCoordinateRotation.C.
References NotImplemented.
|
virtual |
Transform vector using transformation tensor.
Implements coordinateRotation.
Definition at line 52 of file EulerCoordinateRotation.C.
References EulerCoordinateRotation::R_.
|
virtual |
Inverse transform vectorField using transformation tensor field.
Implements coordinateRotation.
Definition at line 78 of file EulerCoordinateRotation.C.
References NotImplemented.
|
virtual |
Inverse transform vector using transformation tensor.
Implements coordinateRotation.
Definition at line 59 of file EulerCoordinateRotation.C.
|
virtual |
Transform tensor field using transformation tensorField.
Implements coordinateRotation.
Definition at line 95 of file EulerCoordinateRotation.C.
References NotImplemented.
|
virtual |
Transform tensor using transformation tensorField.
Implements coordinateRotation.
Definition at line 105 of file EulerCoordinateRotation.C.
|
virtual |
Transform tensor sub-field using transformation tensorField.
Implements coordinateRotation.
Definition at line 114 of file EulerCoordinateRotation.C.
References NotImplemented.
|
virtual |
Transform vectorField using transformation tensorField and return.
symmetrical tensorField
Implements coordinateRotation.
Definition at line 126 of file EulerCoordinateRotation.C.

|
virtual |
Transform vector using transformation tensor and return.
symmetrical tensor
Implements coordinateRotation.
Definition at line 142 of file EulerCoordinateRotation.C.
|
virtual |
Write.
Implements coordinateRotation.
Definition at line 287 of file EulerCoordinateRotation.C.
References token::END_STATEMENT, Foam::nl, and Ostream::writeKeyword().

|
private |
Local-to-global transformation tensor.
Definition at line 71 of file EulerCoordinateRotation.H.
Referenced by EulerCoordinateRotation::clear(), EulerCoordinateRotation::e1(), EulerCoordinateRotation::e2(), EulerCoordinateRotation::e3(), EulerCoordinateRotation::R(), and EulerCoordinateRotation::transform().
|
private |
Global-to-Local transformation tensor.
Definition at line 74 of file EulerCoordinateRotation.H.
Referenced by EulerCoordinateRotation::clear(), and EulerCoordinateRotation::Rtr().
Copyright © 2011-2018 OpenFOAM | OPENFOAM® is a registered trademark of OpenCFD Ltd.
Generated by
 1.8.17
1.8.17
